Vernetzte Experten- und Assistenzsysteme sind menschlichen Entscheidungsprozessen in Schnelligkeit und Präzision in vielen Bereichen bereits deutlich überlegen und bestimmen zunehmend die Handlungsroutinen von Maschinen und damit die Interaktionen mit Mensch und Raum. Im Alltag führt dies zu Verunsicherung.
Wir wollen sie als Chance begreifen, um urbane Lebensqualität neu zu denken. Um nämlich wirklich kooperieren, interagieren oder auch nur koexistieren zu können, müssen neue Formen des Miteinanders entwickelt werden, die Intentionen, Kognition und Intuition zu neuen Interaktionsqualitäten verknüpfen.
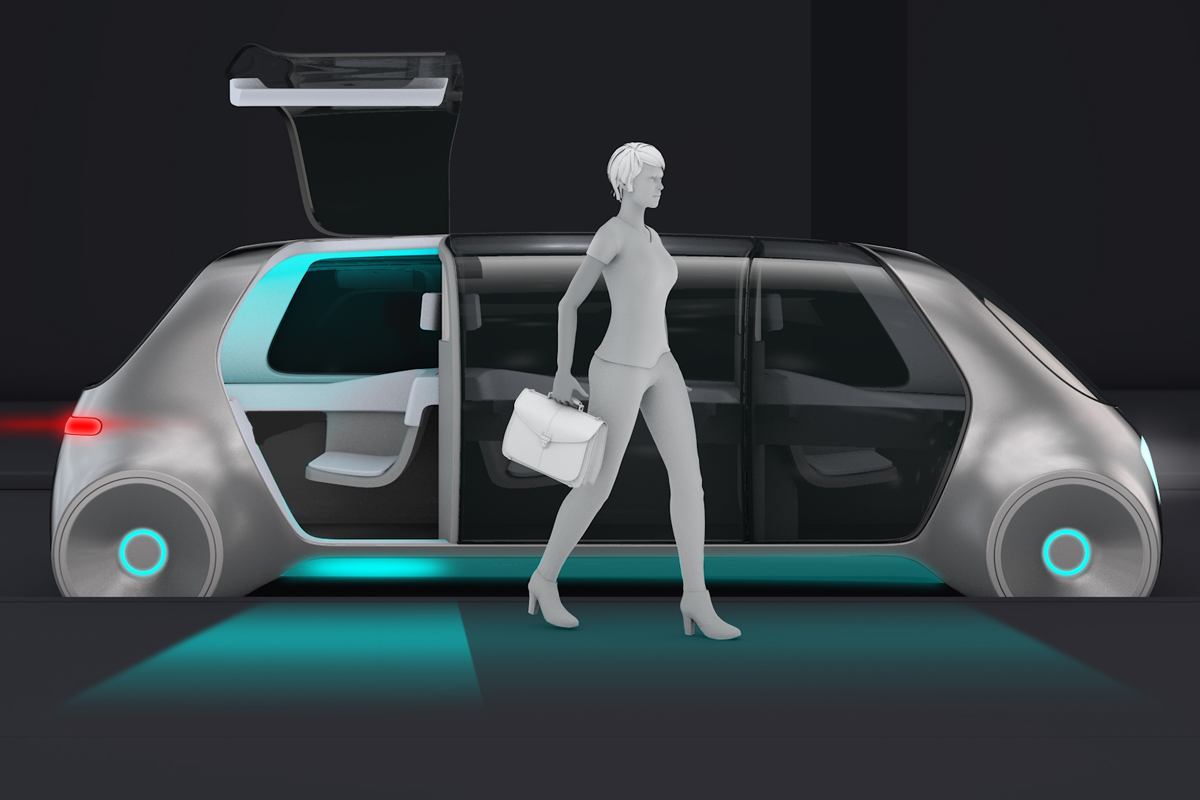
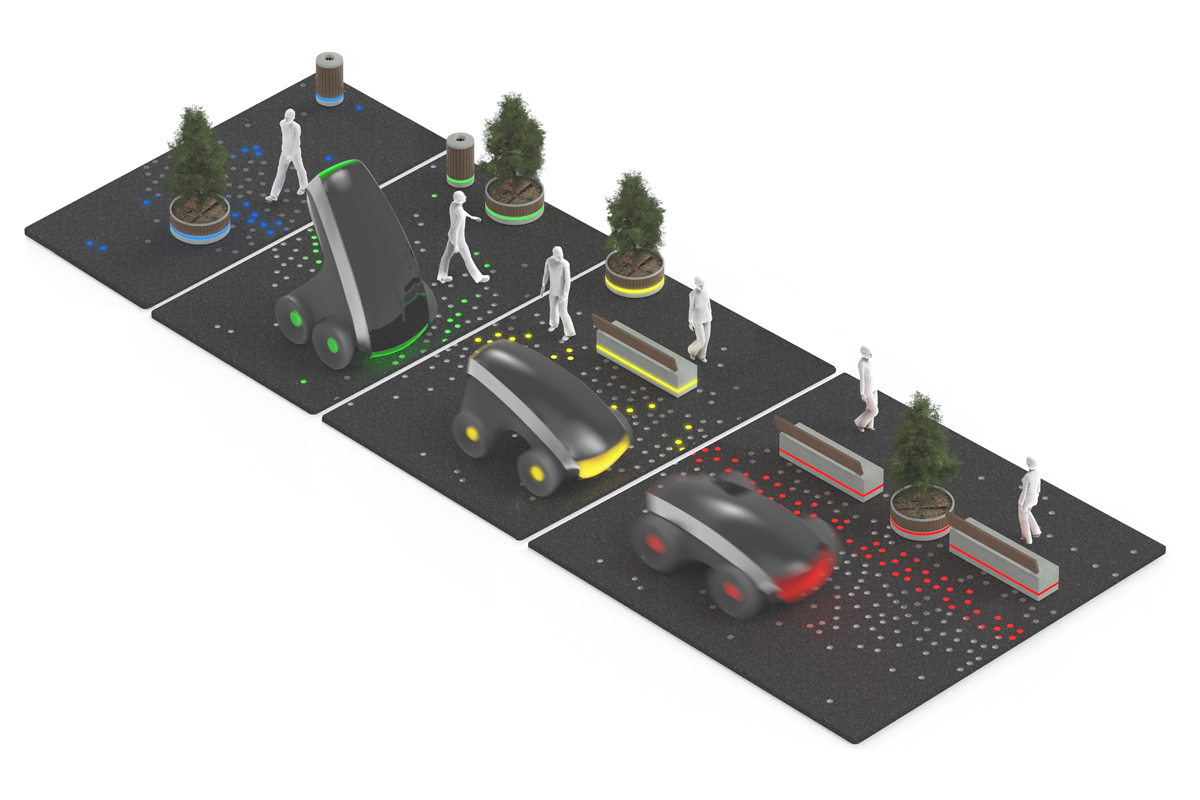
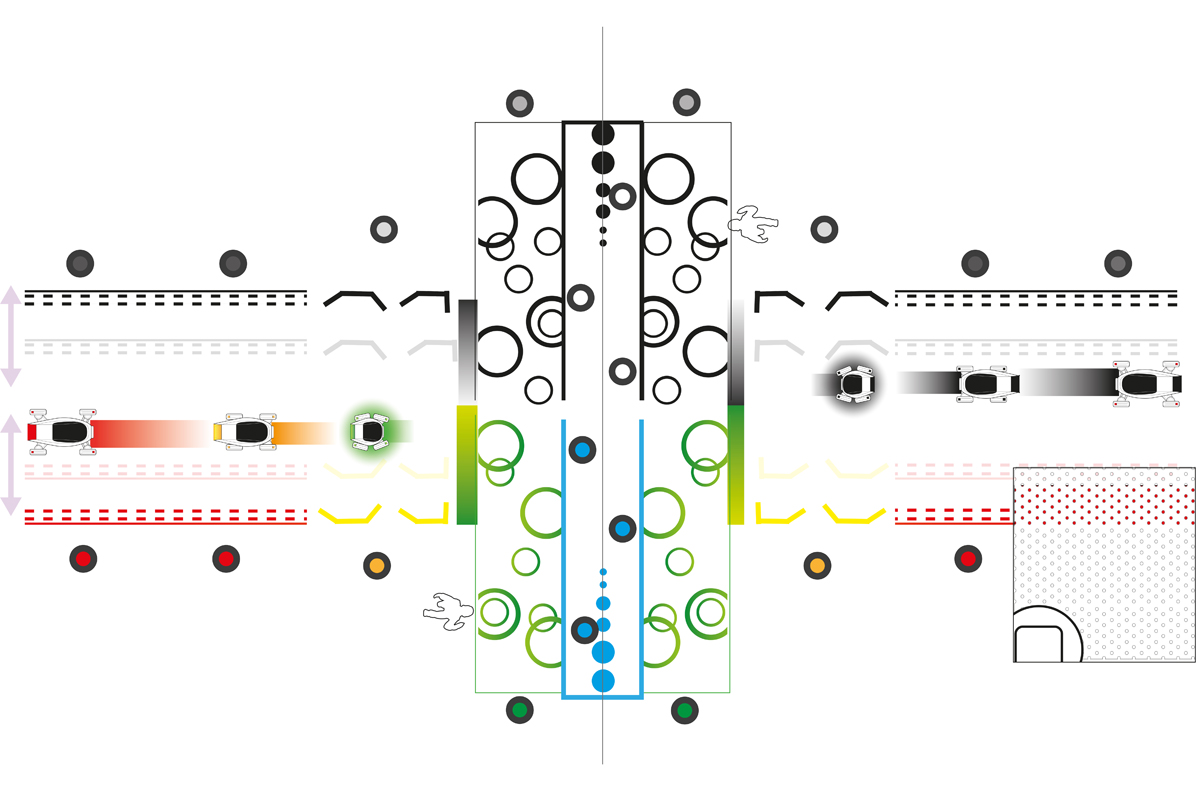
Im Projekt „Dynamic Space“ haben wir vermeintliche Konstanten unseres urbanen Raumes in Frage gestellt und uns mit den vielfältigen Möglichkeiten und Herausforderungen auseinandergesetzt, die sich aus den Begegnungen zwischen Akteuren im öffentlichen Raum ergeben. Mit unseren beiden Kooperationspartnern, der Forschungsabteilung von Daimler und dem Fab Lab Berlin haben wir Hypothesen und konkrete Konzepte für Koexistenz, Interaktion und Kooperation von Lebewesen und Maschinen gestaltet.
Projektpartner:
Daimler-Forschungsabteilung
Fab Lab Berlin
eLAB Berlin